ロボットに行動を教える若きエンジニア 中国・安徽省合肥市
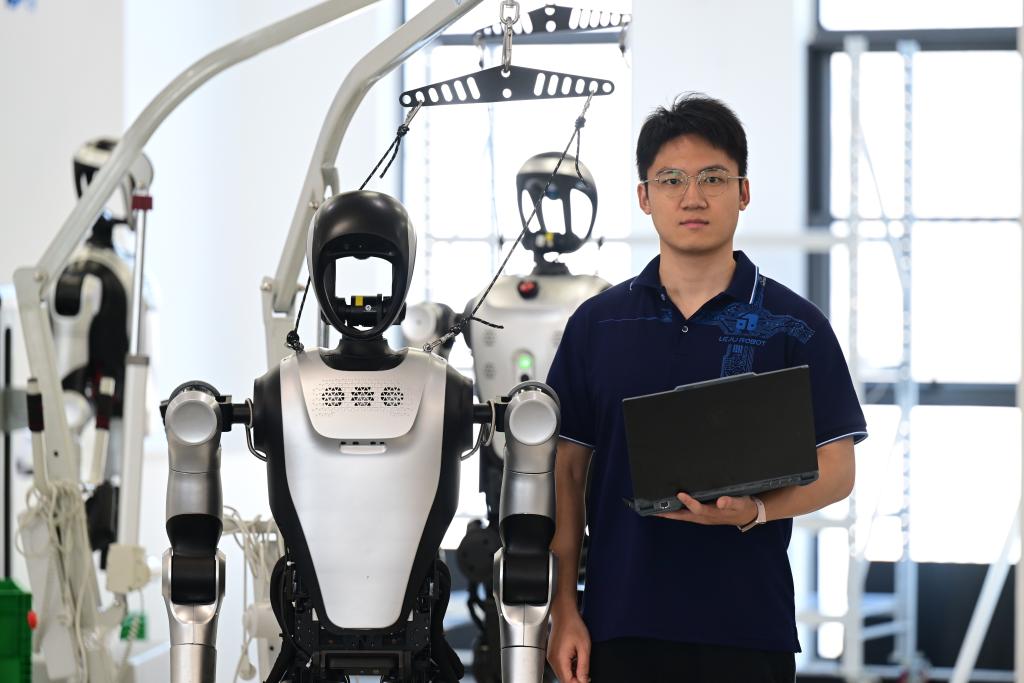
合肥楽聚機器人技術の実験エリアで、「夸父」ロボットと記念撮影する張鴻偉さん。(10月24日撮影、合肥=新華社記者/周牧)
【新華社合肥11月20日】中国安徽省合肥市のロボット企業、合肥楽聚機器人技術のロボットアプリケーション開発エンジニア、張鴻偉(ちょう・こうい)さん(26)は、ロボットに必要な動作を覚えさせるティーチング作業を担当している。張さんは人型ロボットについて、実際の環境を認識、感知し、計算を通じて自律的に判断、行動決定すると同時に、継続的に学習と反復(イテレーション)を重ねることができるとし、これがいわゆる「エンボディドAI(身体性を持つ人工知能)」だと説明した。

コンピューターで人型ロボットのテスト運転データを確認する張鴻偉さん。(10月24日撮影、合肥=新華社記者/杜瀟逸)
張さんは現在、会社の「夸父(Kuavo)」ロボットに工業生産作業を教えている。まずユーザーのニーズを把握し、それをロボットが理解できるコードに分解して、ソフトウエアを用いて仮想環境でシミュレーションする。動作に問題が出なくなるまでデバッグを繰り返したら、実機にコードを展開(デプロイ)し、実験室で実際の環境を想定したテストを行う。ロボットの行動にエラーが発生した場合、同僚とともに運転データから原因を探し出し、問題を修正する。テストと調整を繰り返しロボットの動作が安定すると、現場に導入して動作確認を行う。張さんはエンジニアとして現場に立ち会い、顧客への引き渡しと使い方の説明も行う。

河北省石家荘市で開かれた「2025中国国際デジタル経済博覧会」で来場者に「夸父」ロボットを紹介する張鴻偉さん(右)。(10月19日撮影、合肥=新華社配信)
張さんは「夸父」ロボットがすでに一部の工場で導入されていると紹介しつつ、「人型ロボットの産業利用はまだ模索の段階にあり、現時点では主に搬送やピッキング、移動などの作業を行っている」と指摘した。実際の工場環境では新たな問題が発生する可能性があり、継続的に問題を分析してイテレーションを重ねることで、ロボットを工場の要求に適応させていく必要があると述べた。二足歩行の人型ロボットは人間が働く物理的な環境に適しているため、人型ロボットの工場作業への導入が、今後の発展の方向性になると確信していると語った。
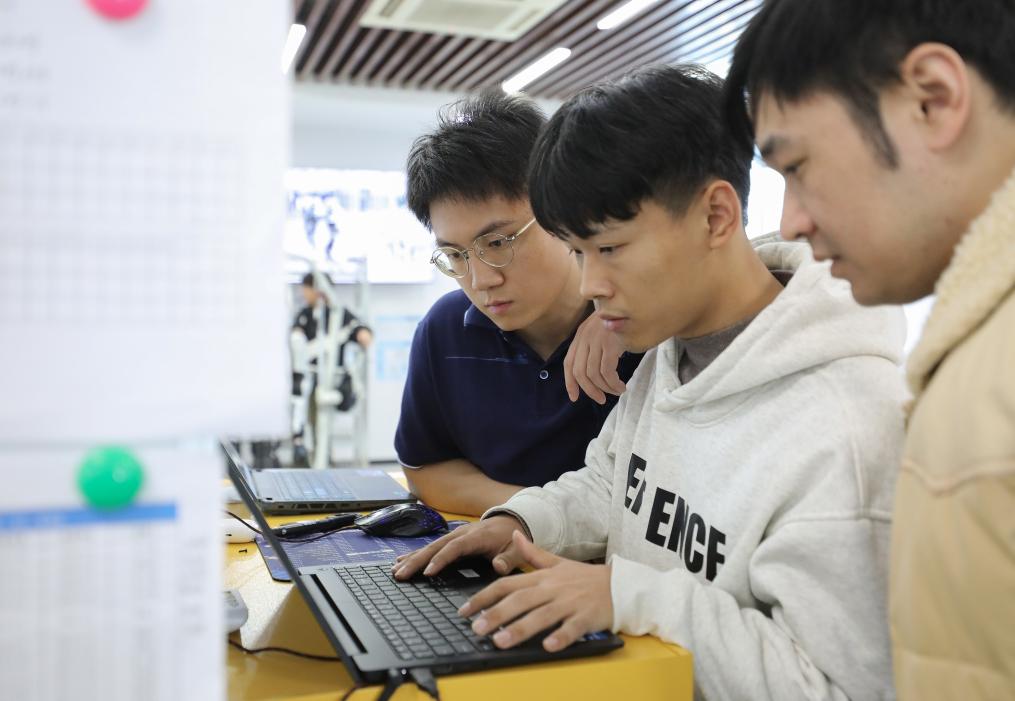
同僚と人型ロボットの運転データを研究し、テストで発生した失敗の原因を探す張鴻偉さん(左)。(10月24日撮影、合肥=新華社記者/杜瀟逸)

人型ロボットのテストデータを確認するスタッフ。(10月24日撮影、合肥=新華社記者/杜瀟逸)
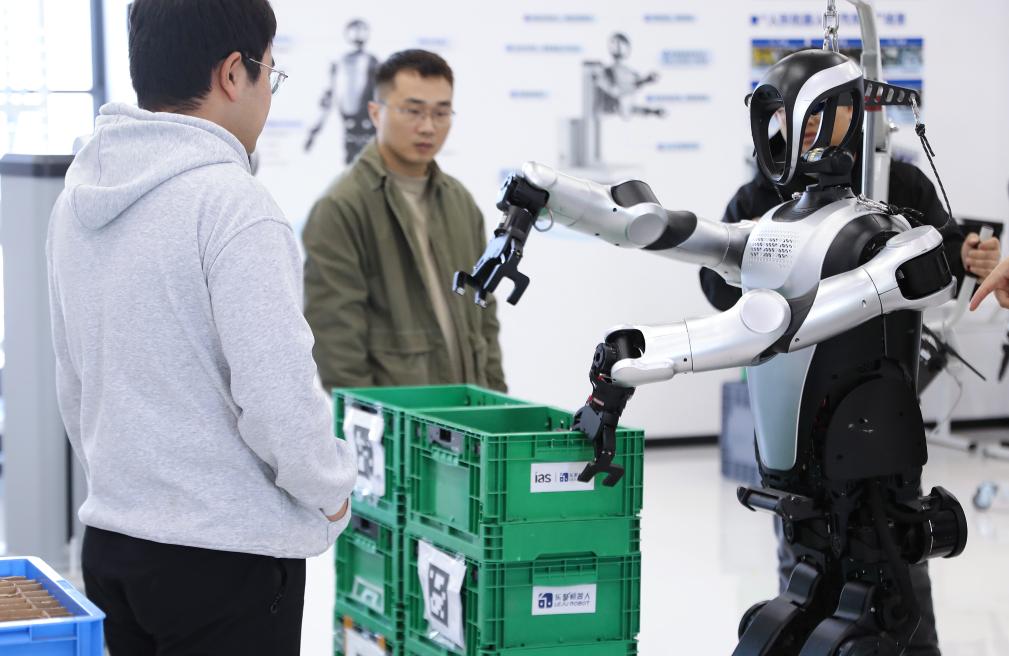
人型ロボットがプラスチック製のカゴを運ぶ動作を観察するスタッフ。(10月24日撮影、合肥=新華社記者/杜瀟逸)

モーションキャプチャーでデータを収集するため、同僚の指導を受けながら仮想現実(VR)機器を使ってロボットの遠隔操作を行う張鴻偉さん(右)。(10月24日撮影、合肥=新華社記者/周牧)

会社の実験エリアでロボットが部品をつかむ動作を観察する張鴻偉さん。(10月24日撮影、合肥=新華社記者/周牧)

実験室でロボットをデバッグする張鴻偉さん。(10月24日撮影、合肥=新華社記者/周牧)

仮想ソフトウエアにコードを記述し、シミュレーションを行う張鴻偉さん。(10月24日撮影、合肥=新華社記者/周牧)

ロボットにバッテリーを取り付ける張鴻偉さん。(10月24日撮影、合肥=新華社記者/周牧)
(3)ロボットに行動を教える若きエンジニア 安徽省合肥市
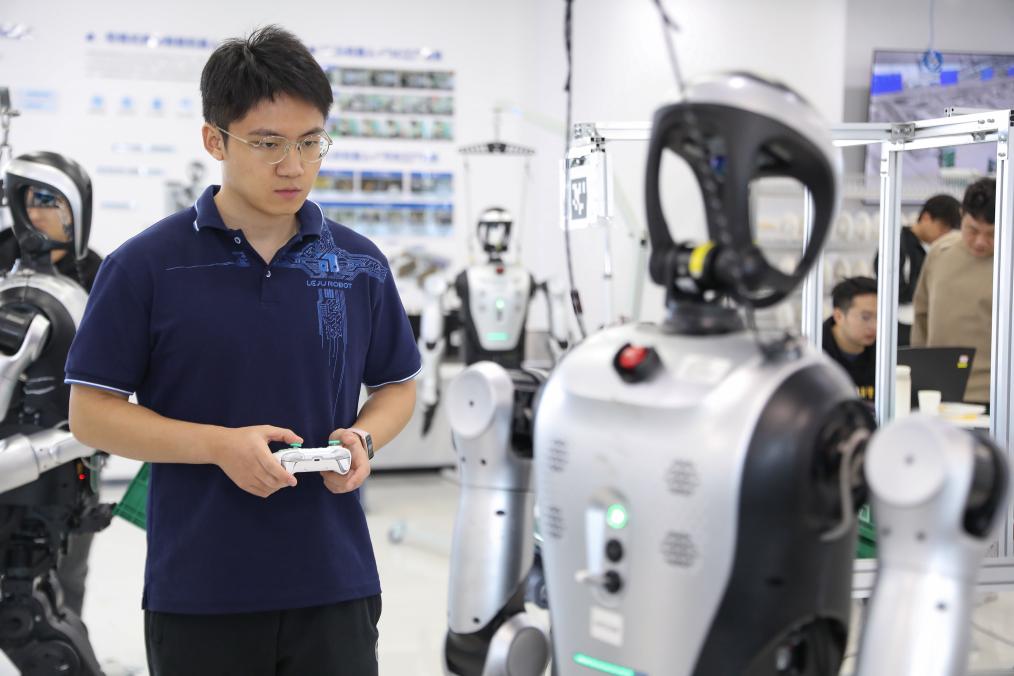
人型ロボットを操作し、動作確認の準備をする張鴻偉さん。(10月24日撮影、合肥=新華社記者/杜瀟逸)

モーションキャプチャーでデータを収集するため、同僚の指導を受けながら仮想現実(VR)機器を使ってロボットの遠隔操作を行う張鴻偉さん(右)。(10月24日撮影、合肥=新華社記者/周牧)

会社の実験エリアでロボットが部品をつかむ様子を観察する張鴻偉さん(左)。(10月24日撮影、合肥=新華社記者/周牧)